|
|
 |
<<<предыдущая статья | оглавление
К патентам природы.
История науки и техники изобилует примерами, когда прогресс в той или иной области приостанавливался, а разрешение трудной проблемы приходило со стороны, путем заимствования новых исходных начал из других областей знаний. В последние десятилетия все большее признание получает творческое содружество биологов с инженерами, математиками, физиками и химиками. Биологи собирают исходные данные, которые отбирают, обобщают, проверяют и интерпретируют специалисты в других областях науки. На этой основе возникла новая наука - бионика.
Природа в результате длительного отбора целесообразных форм и методов достигла результатов, о которых человек пока может лишь мечтать. До сих пор он не сумел создать конструкций, повторяющих принципы живых существ, - ни в сухопутном транспорте (нога), ни в авиации (машущее крыло), ни в судостроении (перемещение за счет волнообразных движений хвоста и туловища). Гребной винт - изобретение человеческого ума - природа не сочла достаточно эффективным и не снабдила им ни одного из морских обитателей. И не ошиблась. Ведь по своей эффективности движительные комплексы рыб и морских животных значительно превосходят самые совершенные гребные винты. Академик В. В. Шулейкин, исследуя движение рыб, вычислил, что КПД их движительного комплекса достигает 65- 83 %.
Кораблестроители проявляют особый интерес к науке, занимающейся раскрытием гидробиологических закономерностей и использованием их в практике. Это направление, возникшее на стыке классической гидродинамики, с одной стороны, и биологии, с другой, и получившее название гидробионики, все громче заявляет о себе. Одним из основных направлений гидробионики является разработка рациональных форм и методов снижения сопротивления тел, движущихся в водной среде, и новых движительных комплексов.
С древнейших времен судостроители обращали внимание на морских обитателей, заимствуя в них формообразования, но подражание носило чисто интуитивный характер. Ученые наших дней знают, что различные формы тела рыб и морских животных подчинены определенным математическим правилам. Строение головы, форма хвоста, плавников - все у обитателей рек, морей и океанов соответствует способу и скорости передвижения. Профиль одной из самых быстроплавающих рыб - тунца - приближается к ламинаризированному профилю, найденному теоретически и экспериментально в аэродинамических лабораториях. А зачем бивень меч-рыбе? Возможно, он необходим для соответствующего обтекания ее тела струями воды. Ведь скорость меч-рыбы достигает 70 уз. На этом основании исследователи предполагают образование на кончике меча кавитационной каверны, охватывающей переднюю часть туловища. Бивень как бы "организует" каверну и восстанавливает плавное обтекание струйных потоков вокруг тела рыбы.
Одним из "учителей" кораблестроителей стал дельфин, отдельные виды которого способны развивать скорость до 25 уз. Наблюдались случаи, когда дельфин сталкивал с курса торпеду, как бы вызывая ее на состязание. Но дело не в абсолютной величине скорости животного. В 1936 г. английский зоолог Джеймс Грей установил, что сопротивление дельфина при его движении в воде, рассчитанное обычным для судостроения способом, оказывается в 8-10 раз больше того, которое способна преодолевать мускулатура животного. Ведь мышечная сила у всех млекопитающих, в том числе и китообразных, в пересчете на килограмм массы мышц примерно одинакова. Напрашивается вывод, что каким-то весьма эффективным способом дельфин снижает сопротивление своего туловища. Это несоответствие, получившее название "парадокс Грея", заставило начать работы в направлении, которое недвусмысленно подсказал сам профессор:
Природа сконструировала дельфина много совершенней, чем человек подводную лодку или торпеду.
В попытках разгадать "секрет дельфина" высказывались различные предположения. Большинство сходилось на том, что дельфин благодаря своей гладкой и эластичной коже в сочетании с жировым слоем демпфирует возмущения воды и тем самым создает вокруг себя ламинарный пограничный слой, снижая сопротивление. Механизм ламинаризации объясняли следующим образом: кожа животного представляет собой гладкую эластичную диафрагму, чувствительную к колебаниям давления, которые имеют место в пограничном слое, обтекающем дельфина. Под диафрагмой находятся каналы, наполненные жидкостью, которая, свободно перемещаясь в них под воздействием кожи-диафрагмы, действует как демпфер, поглощая часть кинетической энергии турбулентного потока и тем самым ламипаризируя пограничный слой.
Высказывалось мнение, что для значительного уменьшения сопротивления кожа дельфина должна не пассивно, а активно демпфировать возмущения в пограничном слое, для чего существует какой-то физиологический процесс, способный управлять изменениями свойств кожи. Известный французский исследователь океана профессор О. Пикар высказал предположение, что нервные окончания в кожном покрове морских животных улавливают изменение давления, предшествующее переходу ламинарного режима обтекания в турбулентный, и через центральную нервную систему передают соответствующие сигналы на демпфирование кожи.
Кожа дельфина в передней части его туловища (особенно хорошо обтекаемой) почти не имеет кровеносных сосудов, в то время как к хвостовой части (где обычно возникает турбулентность и растет сопротивление) количество кровеносных сосудов постепенно возрастает. В связи с этим существует версия, что усиленная циркуляция крови пульсирующего характера в хвостовой части животного как бы демпфирует поверхность, уменьшая турбулентность потока.
Некоторые специалисты считают, что большая часть туловища дельфина участвует в создании движущей силы, т. е. туловище животного одновременно выполняет функции корпуса и движителя. В момент резких ускорений на коже возникают волнообразные складки, распространяющиеся от головы к хвосту, которые называют бегущей волной. При этом как бы сбрасываются возникающие турбулентные вихри и снижается сопротивление. Но для образования бегущей волны необходимы мускульные усилия. Следовательно, управляющая кожей дельфина мускулатура должна непрерывно работать и постоянно находиться в напряжении, что изнурительно для животного. Исследователи осуществили оригинальный эксперимент, в котором участвовали профессиональные пловчихи и дельфины средней величины. Контуры тела женщины плавные, что вызвано особенностями костно-мышечного аппарата и сравнительно большим слоем подкожного жира. Под слоем жировой клетчатки и у дельфинов, и у женщин залегают локомоторные мышцы. Спортсменок буксировали под водой с разной скоростью. Испытания фиксировались на кинопленку. Обнаружилось, что при скорости свыше 4 уз на торсе и бедрах пловчих появлялись волнообразные складки. При снижении скорости складки исчезали. Известно, что у человека нет никаких специальных мышц для движения кожи и сама кожа для этого не приспособлена. Следовательно, волнообразные складки на теле спортсменок образовывались под влиянием гидродинамического воздействия. Из эксперимента следовало, что мускулатура дельфина не принимает участия в образовании бегущей волны.


Волновые деформации кожи дельфина, стремительно бросающегося на добычу, и тела пловчихи, буксируемой под водой со скоростью свыше 4 уз.
Интерес к скоростным качествам морских обитателей не ограничился предположениями и опытами. Одним из первых в 1938 г. немецкий ученый М. Крамер предложил обеспечивающее ламинарное обтекание корпуса покрытие, имитирующее наружный покров тюленей, для чего разместил на поверхности покрытия тонкие упругие проволочки, расположенные очень близко одна к другой и ориентированные вдоль набегающего потока. Крамер предполагал, что демпфирование турбулентных пульсаций в пограничном слое будет осуществляться за счет сил трения между водой и проволочками. Опыты были прерваны с началом второй мировой войны. Позже Крамер сосредоточил внимание на изучении движения дельфинов с целью уменьшения сопротивления ракет и торпед. В последние два года существования фашистской Германии он возглавлял исследовательскую станцию управления ракетами и с небезызвестным В. Фон Брауном принимал участие в создании ракеты "ФАУ-2". Оказавшись после войны в США, Крамер продолжил исследования, направленные на создание покрытия для подводных лодок и торпед, названного "кожей дельфина".
Покрытие представляло собой сложную резиновую оболочку толщиной около 2 мм с гладкой наружной поверхностью. Внутренняя сторона оболочки множеством расположенных в шахматном порядке резиновых столбиков соединялась с внутренним слоем резины такой же толщины, наклеенным на поверхность корпуса подводной лодки. Пространство между столбиками, представляющее собой множество капиллярных сосудов, заполнялось органической жидкостью с относительно большой вязкостью. По замыслу Крамера, пока режим обтекания в пограничном слое будет ламинарным, покрытие должно вести себя как жесткая поверхность, при этом демпфирующая жидкость находится в покое, а поверхность диафрагмы остается гладкой. При возникновении в пограничном слое колебательных или волновых движений на гребне и впадине полны появится разность давлении, что вызовет распространение волнообразования вдоль покрытия и колебания резиновой оболочки, а через нее и демпфирующей жидкости. При этом турбулизапия пограничного слоя должна снижаться, а вернее, переход ламинарного режима обтекания в турбулентный будет отодвигаться в область больших скоростей подводной лодки.
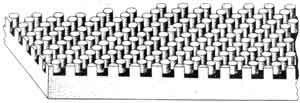
Схема покрытия типа "кожа дельфина"
По аналогичному принципу было разработано покрытие "ламинофоло", применение которого на торпедах позволило без изменения мощности двигателя увеличить их скорость в 1,5-2 раза.
О применении покрытия Крамера на подводных лодках не сообщалось. Можно предполагать, что на пути реализации этой идеи возникли значительные технические трудности, связанные с тем, что в отличие от торпеды - оружия одноразового использования, движущегося к цели с постоянной скоростью, в условиях подводного корабля покрытие должно быть эффективным в интервале его скоростей, а следовательно, в соответствующей полосе частот, на которые оно и должно настраиваться с учетом турбулентности набегающего потока, местных возмущений и различных гидродинамических помех.
Существует мнение, что кожный покров дельфина обладает такими особенностями, которые свойственны лишь живой активной оболочке, и если гидродинамическое сопротивление дельфина при прочих равных условиях в несколько раз меньше, чем у твердого тела, то это, по-видимому, является результатом комплексного влияния еще не раскрытых специфических особенностей гидродинамики живого организма в целом (формы тела, нестационарности его движения, демпфирующей способности кожного покрова, гидрофобности кожи и т. д.). Но несмотря на подобные взгляды, моделирование активного действия, характерного для кожного покрова морских животных, продолжает рассматриваться как одна из перспективных проблем кораблестроения.
Определенные надежды специалисты по гидробионике связывают с так называемым нестационарным движителем, создающим тягу колебаниями несущей поверхности, имеющими конечную амплитуду, подобно движению хвостового плавника или туловища морского .обитателя. Некоторые исследователи считают, что принцип нестационарности движителя, по-видимому, и лежит в основе экономичности передвижения рыб и морских животных, так как они совершают туловищем и плавниками сложные изгибно-крутильные колебания, согласованные между собой таким образом, что при равномерном постунательном движении затрачивается очень небольшое количество энергии.
Модель подводного судна с волновым движителем
Первым обратил внимание на нестационарный движитель еще в 20-е годы, когда не существовало само понятие бионики, наш соотечественник известный художник и талантливый изобретатель Петр Васильевич Митурич, предложивший использовать в качестве движителя гибкий корпус самого судна, совершающий волнообразные движения. Как указано в свидетельстве на изобретение № 33418 от 8 января 1930 г., движитель представлял собой
"приводимые во вращение изогнутые стержни, расположенные внутри эластичного корпуса, в целях сообщения этому корпусу при помощи шатунов, связанных со стержнями, волнообразного движения".
Идея была столь необычна, что специалисты поторопились отнести ее к области фантазии. Хотя Митурич построил модель и испытал ее в Сокольническом пруду в Москве, они говорили:
Мы, судостроители, боремся с гибкостью судов, а вы ищите в ней какие-то динамические возможности. Смело до безумия, но фантастично и неактуально.
Прошло около 40 лет, и к идее волнового движителя обратились два американских студента, построившие действующую модель подводной лодки без гребного винта и рулей. Эластичная оболочка обтягивает корпус, разделенный на 17 равных частей, каждая из которых снабжена парой магнитных колец. Пара состоит из внутреннего кольца, магнитная сила которого зависит от подаваемого электрического тока, и внешнего, являющегося постоянным магнитом. Внутренние кольца закреплены на корпусе, а внешние - на внутренней стороне эластичной оболочки. При изменении тока, питающего электромагнит внутреннего кольца, изменяется сила притяжения к нему внешнего кольца. Оболочка сокращается за счет изменения параметров тока во всех 17 электромагнитных кольцах, искусственный хвост совершает волнообразные движения и модель бесшумно движется со скоростью около 2 уз. Ну, а если судну нужно всплыть или повернуть? Для этих целей кольца разделены на четыре сектора, при этом к каждому сектору внутренних колец подводится автономное электропитание. Подавая ток к двум секторам, можно вызвать волнообразное движение только одной стороны корпуса и модель поворачивается. При подаче питания на нижние или верхние секторы она, соответственно, всплывает или погружается.
Общий принцип движения модели тот же, что и предложенный Митуричем, но конструктивное решение иное и более рациональное. Так ведь за прошедшие с той поры десятилетия во всех областях науки и техники был достигнут огромный прогресс. Например, благодаря развитию химии удалось создать эластичный и прочный материал для оболочки. Достижения в электротехнике позволили сделать электромагнитный движительный комплекс. П. В. Митурич был первым, а первым всегда намного труднее.
Конечно, при создании подобной подводной лодки проблем будет в изобилии. Но несмотря на ожидаемые трудности, этой идеей заинтересовалось военно-морское ведомство США, согласившееся финансировать проектно-изыскательские работы.
Однако не следует переоценивать возможности бионики. Ведь совершенные биологические системы появились в результате естественного отбора, осуществлявшегося но принципу: отбирать все лучшее из уже существующего. Но до настоящего времени все еще сохранились примитивные системы, о чем не следует забывать, рассчитывая использовать изобретения природы в качестве прототипов, ключей к более совершенной технике.
Заканчивается наш рассказ. В исторически короткий срок подводная лодка качественно изменилась. Сравнительно недавно, плавая, как правило, в надводном положении, лодка обычно раньше обнаруживала противника, чем он ее. Дым из труб, мачты и надстройки являлись гораздо более приметными ориентирами, чем низкий силуэт подводного корабля. Погрузившись, лодка внезапно атаковала торпедами. Ответный удар осуществить было непросто. Меняя скорость и глубину погружения, подводная лодка отрывалась от преследовавших ее надводных кораблей, несмотря на то, что их скорость была намного большей. Но, проигрывая в скорости, она маневрировала в трехмерном водном пространстве, в то время как надводный корабль "привязан" к поверхности воды. АЭУ сделала подводную лодку истинно подводным быстроходным кораблем, способным без всплытия на поверхность совершать кругосветные переходы. Достигнутое не является пределом. В военно-морских кругах США высказываются прогнозы, что прогресс в атомном подводном кораблестроении позволит уже в относительно недалеком будущем создать быстроходные глубоководные лодки, практически неуязвимые для сил и средств противолодочной обороны. Не следует, однако, забывать, что упомянутые силы и средства также не останавливаются в своем развитии, но это - тема не нашей книги...
<<<предыдущая статья | оглавление |